Figure 15
Download original image
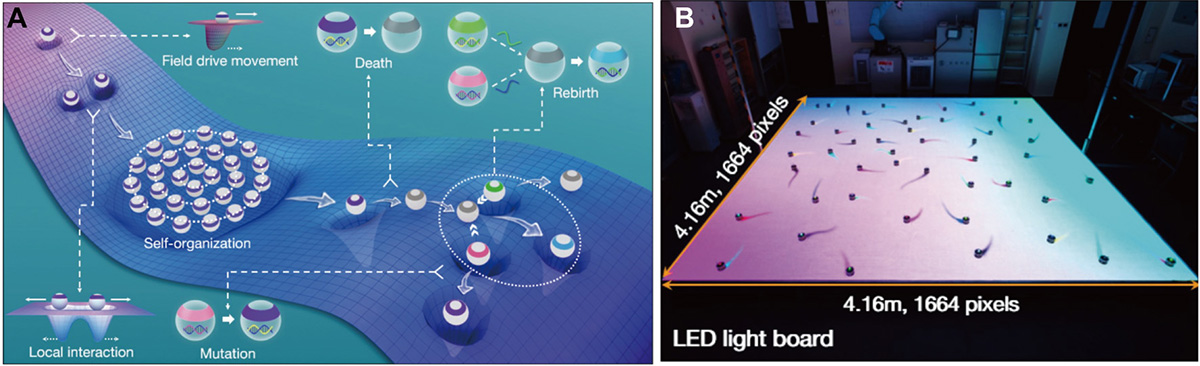
(A) Depiction of the complex interactions of the robots. Ribbon: The robots move via self-generated field drive on a resource landscape generated by an underlying LED light board, which the robots sense. Field drive is the self-generated movement of the robots in response to local resource depletion. (B) The LED light board with robots across an RGB nested set of landscapes (Adapted with permission from Ref. [135]. Copyright c 2022, PNAS).
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.